在这篇文章中你将会看到:
无人驾驶传感器的种类
分分钟了解激光雷达的详细分类
传感器有哪些脑洞大开的布置方式
一、无人车是如何“看到”周围的?
聊感知,你得知道无人驾驶车都会有哪些传感器。无人车的造型看起来各有特色,但本质是通过一系列不同的传感器作为自己眼睛、耳朵来对外面的世界进行观察,而这些传感器也确实是无人驾驶研究中的重要一环。
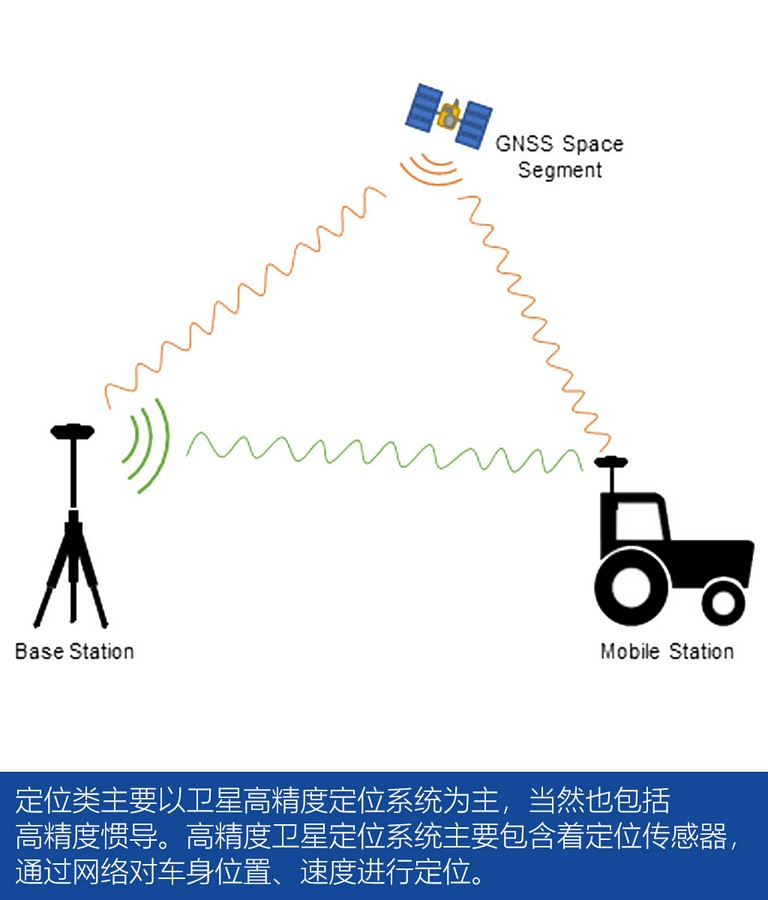
从感知类型上看大概可以分为视觉类、感知类和定位类。


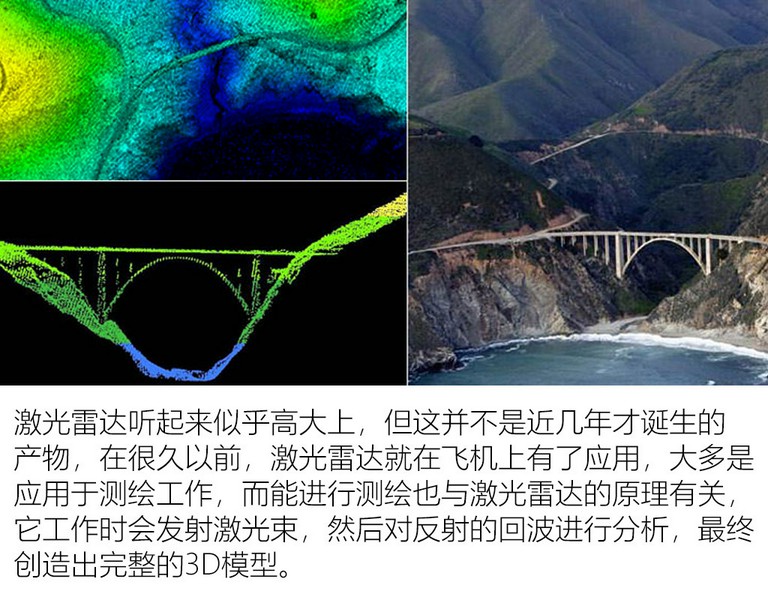
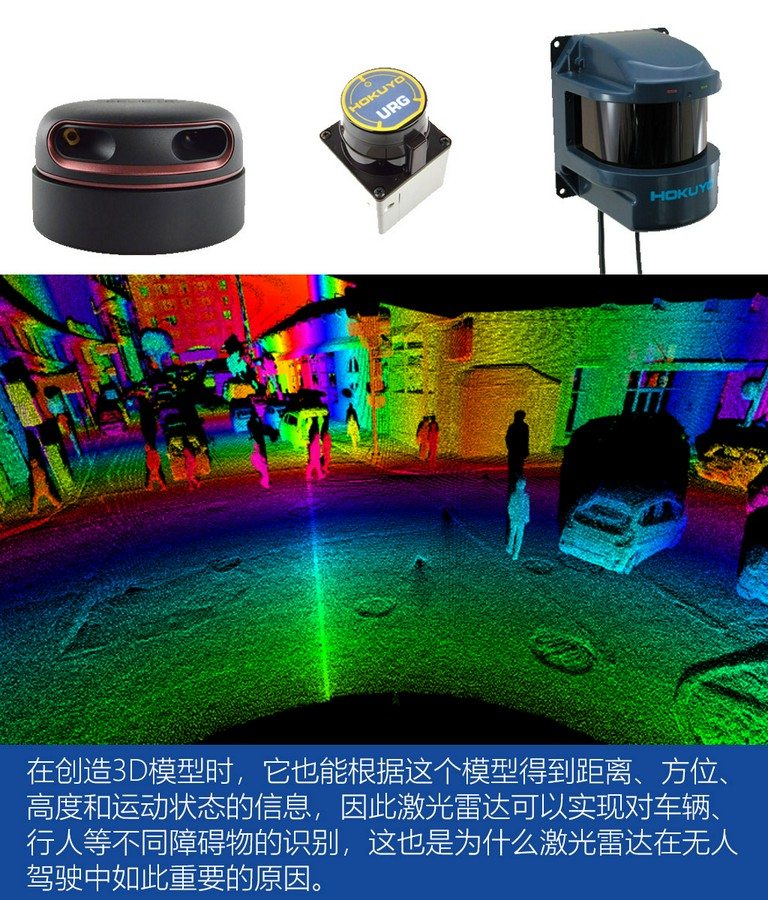
从近到远,分别是超声波雷达-激光雷达-毫米波雷达,而这些不同种类的雷达中,激光雷达显然拥有十分重要的地位。毫米波雷达虽然可以对更远的障碍物进行判断,但很显然它的局限性较大,比如路牌,红绿灯,或者横在道路上的货车车厢等,毫米波雷达是无法对不同水平面上的物体进行有效识别。但激光雷达并不存在这个问题,它的优势在于精确获得前方物体的三维位置信息,同时不受光线等环境因素的影响,因此激光雷达是高精度识别的必须产品。
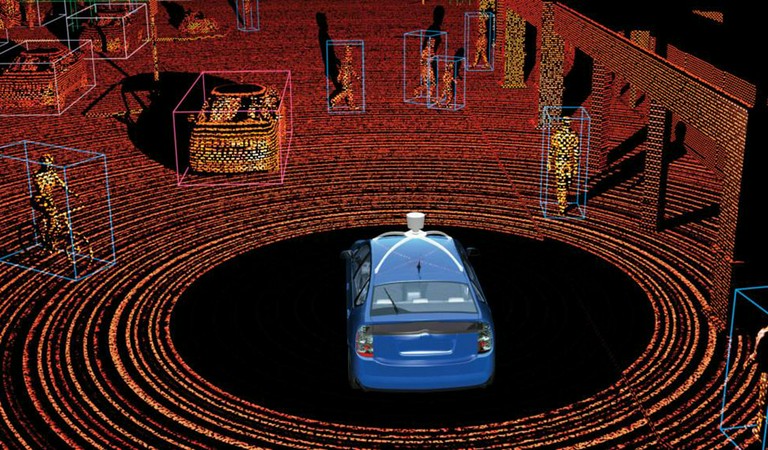
这个地图会和云端的高精度地图进行匹配来定位车辆,同时还要识别行人、车辆、车道线,以及沿途的车辆和环境等,所以激光雷达在整个无人车的传感器中都是举足轻重。
这些不同的传感器各具有不同的优势和缺陷,因此科技公司们在开发无人车或者自动驾驶系统时,通常采用多种传感器结合的方式,而最终的展现形式就是现在我们在电视上看到的那样。
二、最贵的传感器——激光雷达
前面我们已经大概了无人车的基本传感器组成,下面我们来看看这些传感器里面的必需品也是最昂贵的部分:激光雷达。
激光雷达可以按照不同功能进行分类,目前在汽车领域主要按照有无机械旋转部件进行分类,一般分有旋转机械部件的机械式激光雷达和固态激光雷达。
1. 成本较高、产量受限的机械式激光雷达
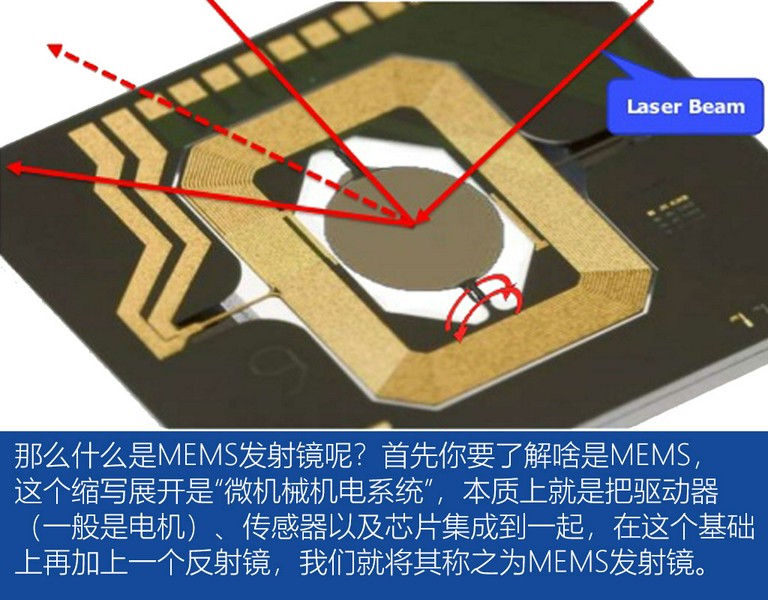
机械激光雷达由光电二极管、MEMS发射镜、激光发射接收器等部件组成,我们所谓的“机械”就是指可以进行360°旋转的并能控制发射角度的MEMS发射镜。
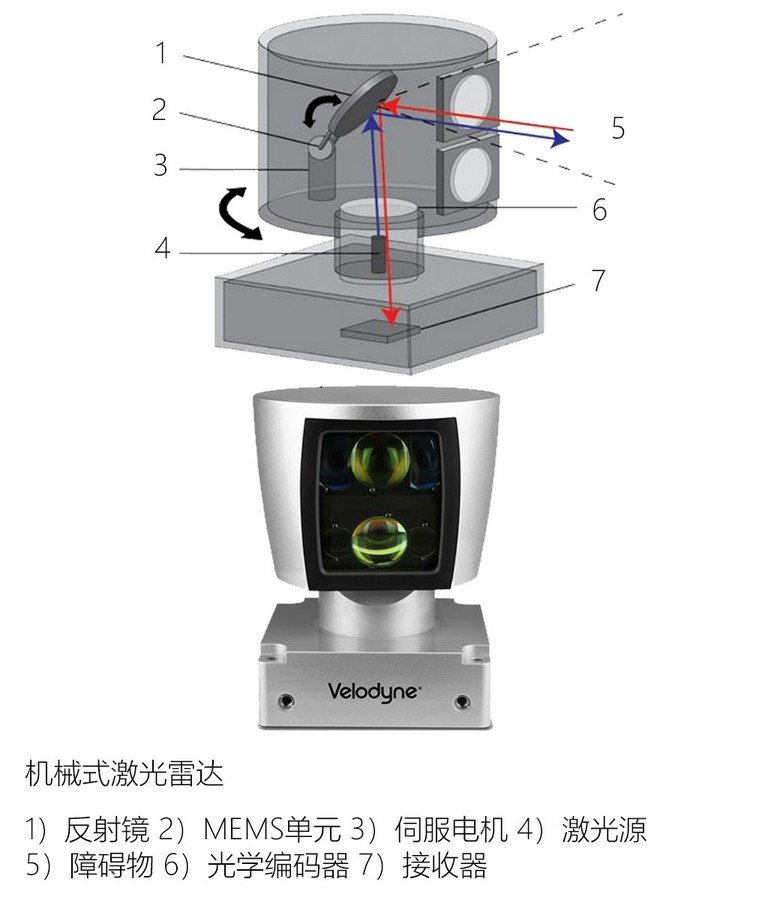

不过机械式激光雷达的缺点也明显:首先是机械旋转机构精度、可靠性要求高,硬件内部的每一条线都有一对激光发射器和接收器组成,为保证精确测距,需要保证激光在完成这100-200米的路程后,刚好能让发射出去的激光要被成对的接收器收到,产品难度较高;目前订单量较小,激光雷达都是采用手工制作,需要将发射和接收模块进行精密光学对准装配,工作繁复,工作量大,大批量生产难度大。
2)强势崛起的固态激光雷达
固态激光雷达和机械式最大的不同在于取消了机械的相关机构,自然而然造型就会变小,这对量产有着重要意义,另外固态激光雷达的扫描结构都是微型化,稳定性相对机械式也有提升。而在成本方面,以美国著名的Quanergy公司为例,他家的固态激光雷达S3目前售价大概在250美元,但订货量超过一万台就可以降到100美元以下。这是机械激光雷达无法企及的价格。(Velodyne机械激光雷达64线基本在80万人民币左右、32线在40万左右)
三管齐下的固态激光雷达
机械激光雷达的技术路线相对比较单一,但固态激光雷达就不同了,我梳理了目前市面上常见的三种技术路线,供大家了解。
○相控阵固态激光雷达(OPA)
提起相控阵雷达,喜欢军事的朋友肯定十分熟悉。比如前段时间下水的055大型驱逐舰就采用了相控阵雷达,外号“肥电”的F35也采用了相控阵雷达。

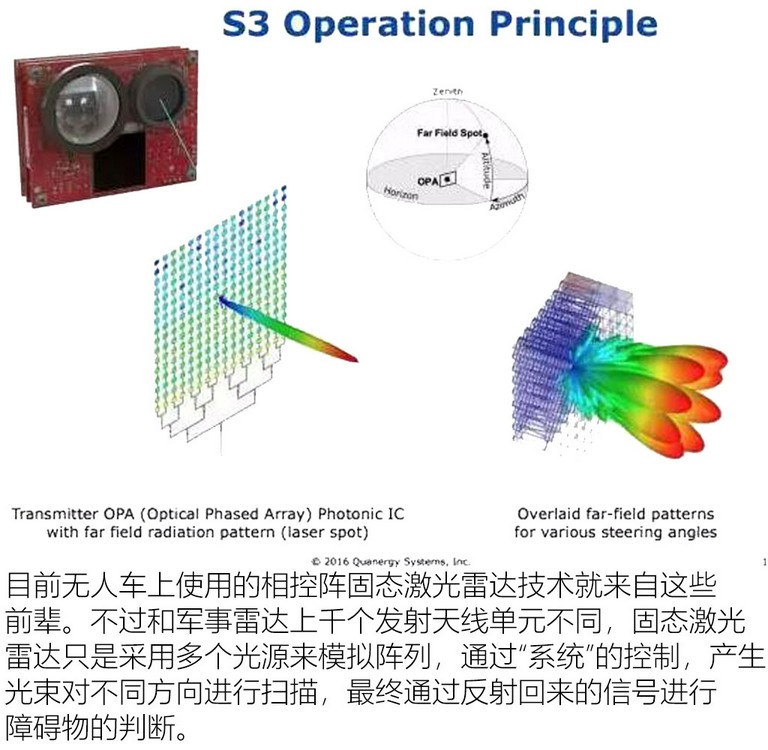
优点: 相控阵固态激光雷达的优点十分明显,主要有三点。第一是扫描速度快,这也是继承军事应用的特点,开机马上使用。第二是扫描的指向精度极高,目前可以做到小数点后面三位的精度。第三是光束容易被控制,简单点就是想对什么区域扫描就能扫描,只要通过电信号对光源进行控制即可。
缺点: 这种技术路线的雷达最大问题就是加工难度过高,同时相控阵激光雷达对材料要求也很高,耐激光的电光材料开发难度较大,相应成本也会比较高,这些问题目前很限制相控阵激光雷达的发展。
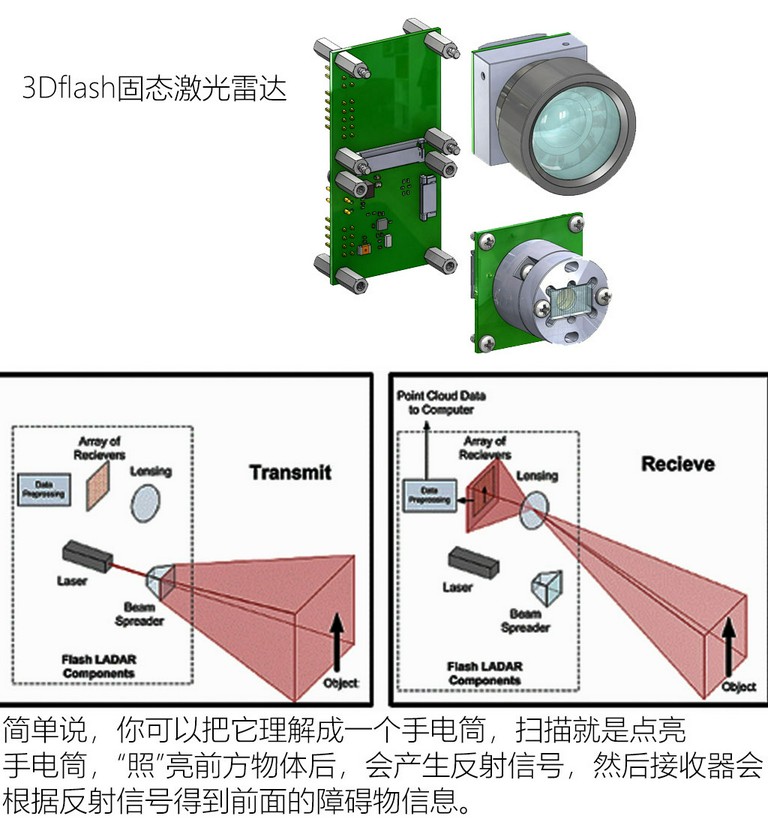
○ 3Dflash固态激光雷达
3Dflash固态激光雷达是一种非扫描式雷达,它可以短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器,来完成对环境周围图像的绘制,以2维或3维图像为重点输出内容。
优点: 这种类型的激光雷达稳定性很好,同时成本占有优势。
缺点: 探测距离近是它的一个主要缺点,而且技术成熟度并不高。
○MEMS固态激光雷达
我在上面已经给大家介绍了MEMS,我们说这是机械激光雷达的一个组件,但其实在固态激光雷达中也有这个技术路线,这也是很多网友经常搞混的地方,这种雷达可以看做是机械激光雷达的进化型。
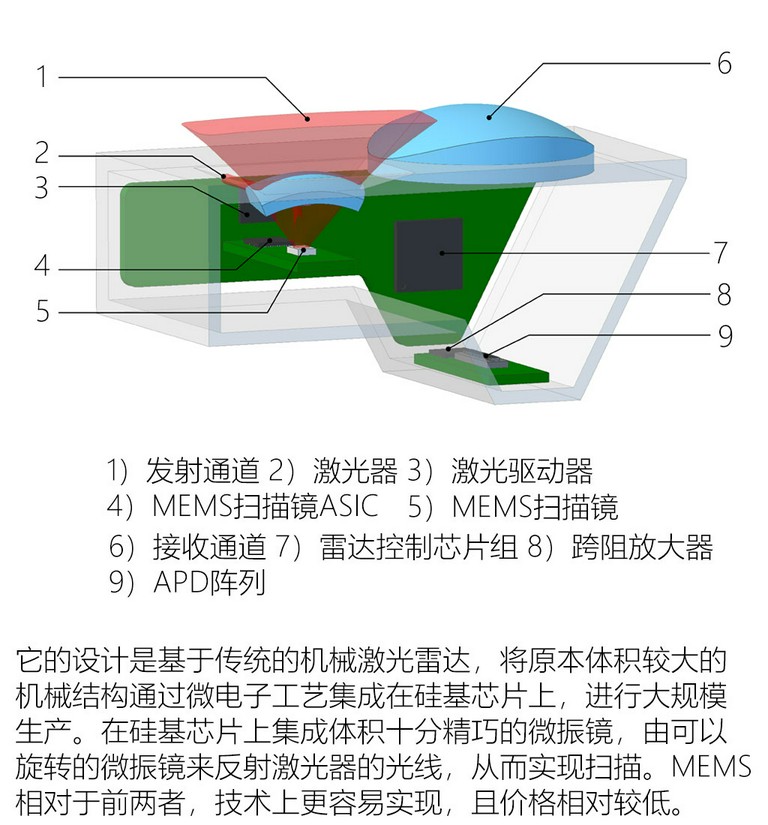
优点: MEMS固态激光雷达的优点在于探测距离长,而且能保证高分辨率,同时因为旋转机械结构的取消,降低了雷达的成本,从量产角度,其零部件较为成熟,容易量产。
缺点: 目前缺点还是在技术难度上,吃透MEMS微振镜还是很有难度的。
以上三种就是目前固态激光雷达的主要分类,除此之外还有一些目前看起来很神秘或者说小众的技术比如Cepton的MMT微动技术。

这种类型的激光雷达最大的优点在于“小”,有多小呢?这种形式的激光雷达可以集成到车灯里面,另外Cepton也透露,因为这种雷达内部的零部件全是目前市场上的量产产品,因此成本较低。
以上内容就是现阶段激光雷达的所有类型,根据专业调查机构的数据,目前固态激光雷达发展迅速,大约在2021年达到装车量产,不过技术路线的格局尚不清晰。当然,虽然激光雷达的路线还处于百家争鸣的情况,但已经有了一些实际的量产应用。比如大陆第一款激光雷达SRL1在2015年用于沃尔沃的City Safety主动安全系统,并实现AEB功能,但级别较低。
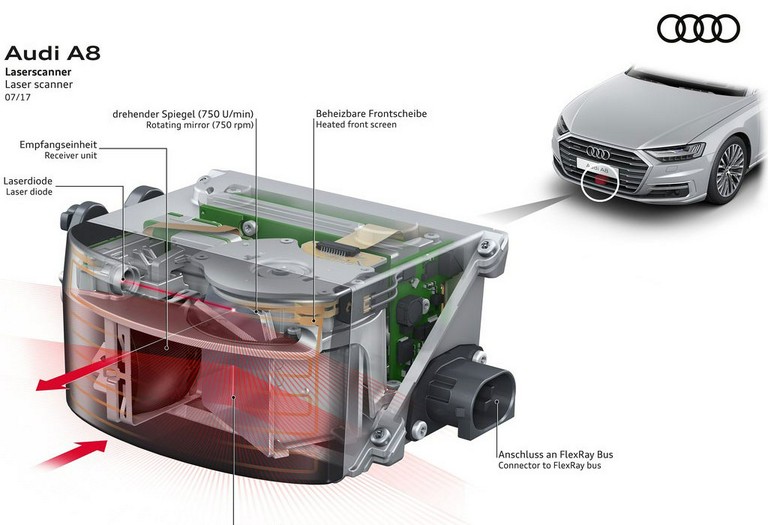
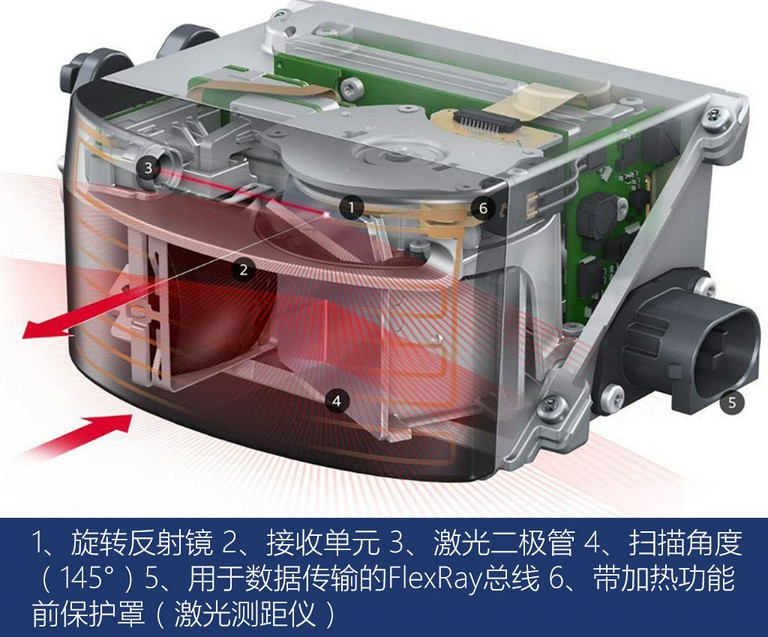
法雷奥则是真正意义上实现量产激光雷达的厂家,法雷奥的激光雷达于Ibeo合作,2010年开发了4线激光雷达,2017年正式实现了量产,2018年上市的奥迪A8成为第一款搭载量产4线激光雷达的车型。
三、顶着大蘑菇太难看,未来会有哪些传感器布置方案?
在解决了激光雷达的问题后,再布置上一圈其他的传感器就完成了一台自动驾驶车的基本传感器布置,但这种看起来科幻味十足的车子,在工程人员的眼中并不完美。

目前看来,各大厂商的思路是想尽各种办法将这些外露的传感器藏起来,有两种方式比较常见。
1)车顶布置
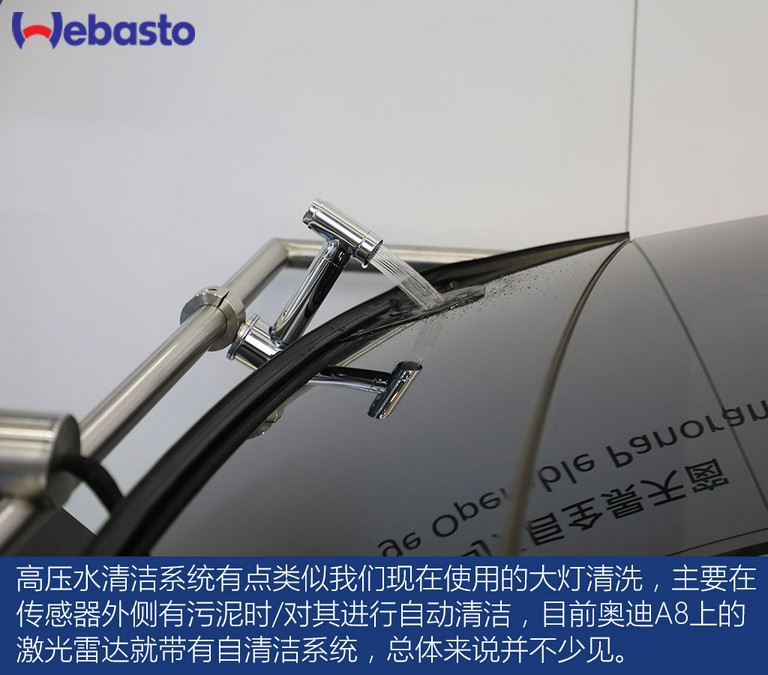
首先就是车顶布置,不过这里的车顶不是指突出在外侧,而是集成在车顶之上。这套方案由伟巴斯特提出的,伟巴斯特认为认为车顶是自动驾驶车辆传感器进行布置的最佳位置,对于没有天窗的车辆,在制造过程中提前加入传感器必然是个可行的方案,但对于未来的车子来说,没有天窗几乎不太可能,因此将天窗和传感器融合是条势在必行的道路。

传感器的定位和全天候稳定工作对感知环境至关重要。因此,为了应对恶劣天气对传感器的干扰,还加入了伟巴斯特最新的高压水清洁系统以及热管理系统。
2)车头车尾布置
车头布置是目前常见的手段,比如奥迪A8和奥迪A6的激光雷达就隐藏在前进气格栅,在未来这也是一种布置方式,不过随着激光雷达的小型化,现在已经出现在车灯内部布置的方案。
这个方案来自上面提到的Cepton。在他们的设计中,一台车会布置四个激光雷达,两个在前面,两个在后面。
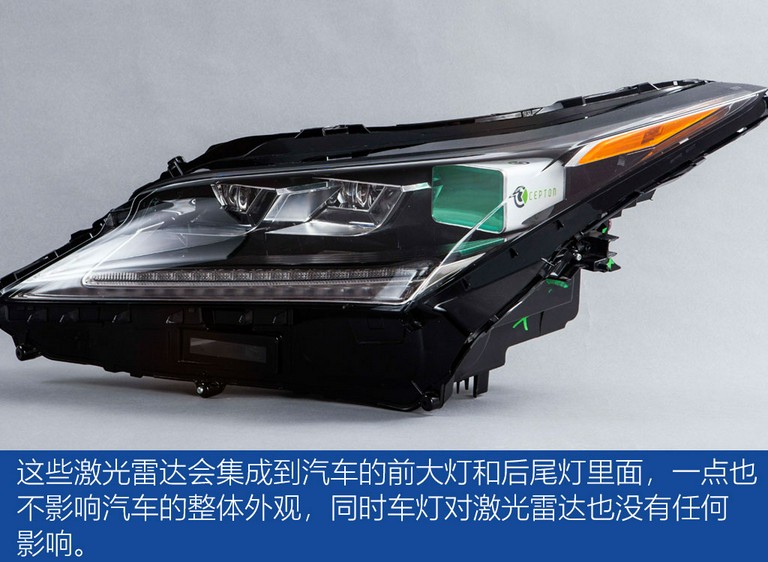
目前日本最大的车辆大灯制造商Koito Automotive(小糸制作所)已经确定了将Cepton的激光雷达集成到LED大灯中的计划,看样子在未来极有可能在雷克萨斯品牌上出现。
四、总结篇
过去三年,全球在激光雷达方面的投资超过10亿美元,其投资公司大多数是供应商,比如法雷奥、博世、大陆等老牌企业,他们通常以收购初创企业或者固定投资,或者合作开发为主,牢牢把握的激光雷达的核心技术。
全球领导者谷歌Waymo同样重视自研激光雷达,目前虽然使用Velodyne作为测试车的传感器,但依然在研发自己的雷达,在2019年已经开发了3种激光雷达。
国内厂商在激光雷达领域追赶迅速,并没有落下太多。包括禾赛科技、镭神智能、华达科捷等厂商在各种类型的激光雷达上都有拿得出手的产品,主要的制约在芯片领域,目前激光雷达系统的核心芯片还比较薄弱,目前飞芯科技等厂商对这方面投入较多。
最后我们来看一下应用前景。激光雷达目前还是成本较高,尤其是机械激光雷达高居不下;目前市场总体规模并不大,同时成本高使其市场渗透率较低。好在各大汽车企业和供应商加大了对激光雷达的投资,同时外部资本依然对这个领域很感兴趣,根据Velodyne的预测,激光雷达市场未来每年都会翻番,而IHS(商业研究机构)预测2025年全球车载激光雷达市场规模规模25亿美元。另一方面,国内厂商正在加快研发步伐,当中国市场越发活跃后,依托巨大市场,有望拉低激光雷达的总体成本。(汽车之家 图/文 冷晓阳)